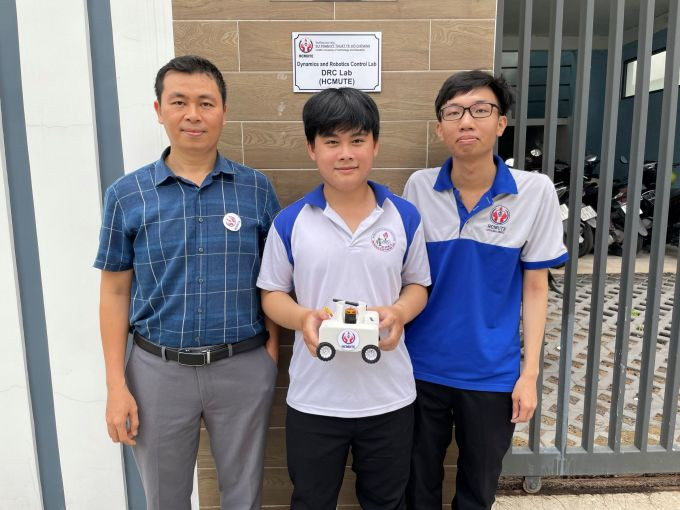
Sản phẩm của Trương Quốc Huy, Lê Văn Đức và Nguyễn Đăng Trường, sinh viên năm 4 Khoa Cơ điện tử chế tạo có thể ứng dụng hỗ trợ nhân viên nối cáp viễn thông trong nhà thuận lợi hơn so với cách đi dây thủ công.
Theo Quốc Huy, khi đi dây nối cáp trên trần nhà, nhiều trường hợp nhân viên viễn thông phải gỡ từng tấm la phông, tốn công sức và thời gian. Mặt khác, một số la phông có kích thước nhỏ, nằm cao nên nhân viên gặp không ít khó khăn khi đi dây. Trước thực tế này, nhóm nghĩ đến chế tạo robot có khả năng leo và di chuyển trên trần nhà mang theo dây cáp.
Trong khoảng 3 tháng, Quốc Huy cùng các thành viên nhóm chế tạo phiên bản đầu tiên robot leo tường kích thước nhỏ gọn (15 x15 cm), có thể luồn qua tấm la phông để di chuyển. Các thành viên nhóm tự thiết kế mạch điện điều khiển động cơ, lắp camera quan sát và xây dựng chương trình điều khiển robot trên điện thoại thông minh.
Thử nghiệm hoạt động robot leo tường khi không mang tải. Video: Hà An
Robot được trang bị động cơ điện chuyên sử dụng cho các máy bay không người lái có công suất lớn. Đông cơ làm quay cánh quạt đặt dưới gầm robot giúp không khí khu vực này bị đẩy ra ngoài, giúp nó bám chặt vào thành tường. Bốn bánh robot có thiết kế nhiều rãnh cao su giúp tăng khả năng bám tường.
Quốc Huy cho biết lực bám của robot mạnh hay yếu do tốc độ quay động cơ quyết định. Lực bám này được nhóm tính toán kỹ vì nếu lực quá thấp sẽ không đủ để robot di chuyển trên tường, gây ngã. Nếu lực bám quá mạnh, robot sẽ gặp khó khăn khi di chuyển.
Theo Văn Đức, robot đã thử nghiệm trên nhiều mặt tường gồ ghề hay có độ phẳng, đều di chuyển ổn định. Với việc đi trên trần, nhóm tính toán tăng tốc độ động cơ, robot có thể đi trên địa hình này. "Việc điều chỉnh công suất hoạt động động cơ dựa vào khối lượng của robot và khả năng mang tải của nó", Đức nói. Vì thế, để giảm áp lực cho động cơ, thiết kế robot phải nhẹ nhất có thể. Nhóm thiết kế khung sườn robot bằng máy in 3D, sử dụng động cơ kích thước nhỏ nhưng công suất lớn. Bộ nguồn là pin lithium nối với động cơ bằng dây dẫn đặt bên ngoài giúp giảm trọng lượng robot.
Hiện trọng lượng không tải robot khoảng 0,5 kg, động cơ có điện thế tối đa 16 V, dòng điện 60 A, có thể mang tải tối đa 1,7 kg (bao gồm tải robot), tốc độ chạy tối đa 4 m mỗi giây với thời gian hoạt động 15 phút. Theo nhóm, robot có thể tăng thời gian làm việc khi sử dụng pin có công suất lớn hơn.
Tuy nhiên, theo Quốc Huy, vì đặt hệ thống pin ở ngoài và kết nối với robot bằng dây dẫn nên khi hoạt động dễ xảy ra vấn đề sụt áp. Tức sau một thời gian, nguồn cung cấp năng lượng cho động cơ không đủ, làm giảm lực bám. Nguyên nhân do dòng điện cung cấp robot rất cao, khi di chuyển đoạn xa, dây nối càng dài tạo điện trở lớn, gây ra hiện tượng hao tổn dòng điện làm giảm sức mạnh động cơ. Để khắc phục hiện tượng sụt áp có thể dùng dây có kích thước lớn hơn, nhưng lại làm tăng trọng lượng robot khi hoạt động. "Sắp tới, nhóm tính toán xây dựng chương trình giúp robot tối ưu hóa việc sử dụng năng lượng bằng cách chỉ cung cấp dòng điện cao trong quá trình leo tường. Khi robot đi trên mặt phẳng sẽ dùng mức năng lượng thấp hơn", Huy nói và cho biết chương trình này sẽ hoàn toàn tự động.
Hiện có một doanh nghiệp viễn thông đặt vấn đề hợp tác thử nghiệm sản phẩm để hỗ trợ nhân viên với giá đặt hàng dưới 1 triệu đồng mỗi robot. Nhóm cho biết, nếu thử nghiệm và thành công sẽ nâng cấp robot tự hoạt động theo chương trình có sẵn không cần người điều khiển.














Ý kiến ()